|
|
|
|
|
|
1) |
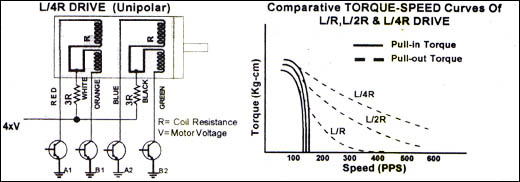
Torque-Speed curve |
|
|
|
|
|
|
|
 |
|
|
|
|
|
|
2) |
Holding Torque : It is the maximum torque require to change the step angle, When the stator winding |
|
|
|
is in exciting state at the rated
voltage. |
|
|
|
|
|
|
3) |
Detent Torque : Torque created on the output shaft of a motor, when stator is in no
exciting state & |
|
|
|
whose rotor uses permanent magnet. |
|
|
|
|
|
|
4) |
Step Angle : The nominal angle through which the shaft of a stepping motor turns in response to one |
|
|
|
pulse signal. |
|
|
|
|
|
|
5) |
Start-Stop Region : The region, in which a stepping motor can
start, stop or reverse in synchronism |
|
|
|
with the external pulse signal. |
|
|
|
|
|
|
6) |
Slew Range : In the region above the start-stop region, a stepping motor can respond without loss of |
|
|
|
synchronism, even when there is a gradual increase in the frequency or the torque load within this |
|
|
|
region. |
|
|
|
|
|
|
7) |
Pull-in Torque : The max. torque at which an energized stepping motor will start and run in |
|
|
|
synchronism in the start-stop region. |
|
|
|
|
|
|
8) |
Pull-out Torque : The max. torque which can be applied to the shaft of a stepping motor without loss |
|
|
|
of synchronism, even when there is a gradual increase in frequency or load torque within the slew |
|
|
|
range. |
|
|
|
|
|
|
9) |
Resonance : When a motor is operated at its natural
frequency, typically 90 to 180 pps or sometimes |
|
|
|
in the higher frequency region, suddenly an increase in the audio and vibration depending on motor |
|
|
|
model selected. In some cases motor will reverse or miss-step also. |
|
|
|
|
|
|
10) |
Acceleration and Deceleration (Ramping ) : In most cases, a stepping motor cannot achieve high |
|
|
|
speeds immediately when started and will overshoot if not decelerated from these speeds.
Therefore, |
|
|
|
acceleration and deceleration, or "ramping" as it is commonly known, must be
provided to assure |
|
|
|
realiable stepping and maintain positioning accuracy in the slew range region. |
|
|